2025-01-29 graphs lecture 3
2025-01-29
see [[Lecture 3.pdf]]
- Recall that if we diagonalizable shift operator
that we can write as and graph signal , then the graph fourier transform is given as
Today
- Graph convolutional filters, which have nice properties
- Locality
- Shift invariance
- Permutation Invariance
- Frequency domain representations
- expressivity
1. Graph Signals and Graph Signal Processing
1.1 graph convolution
A (linear) graph filter is defined as an operator
ie, a graph filter is a linear map from graph signals to graph signals.
This is a basic building block for processing graph signals
(see linear graph filter)
What are potential issues with such filters?
- Since
is not parameterized by the graph or the shift operator, it does not incorporate the graph sparsity pattern. - if nodes
are in different connected components but , this is not consistent with the structure of the graph! - Because of this, we cannot implement
locally at each node. , but we cannot write analogously ie - The number of parameters is
- this is bad for large . - We cannot adapt
for different sized graphs. Once we design , it only works for graphs of size .
Solution: Linear shift-invariant / graph convolution
We define our convolutional graph filter (or linear shift-invariant) as follows:
Note that means
This filter is
- local
- shift equivariant
- permutation invariant
(see graph convolution)
We show each of the properties above:
graph convolution are local.
We can write locally in terms of
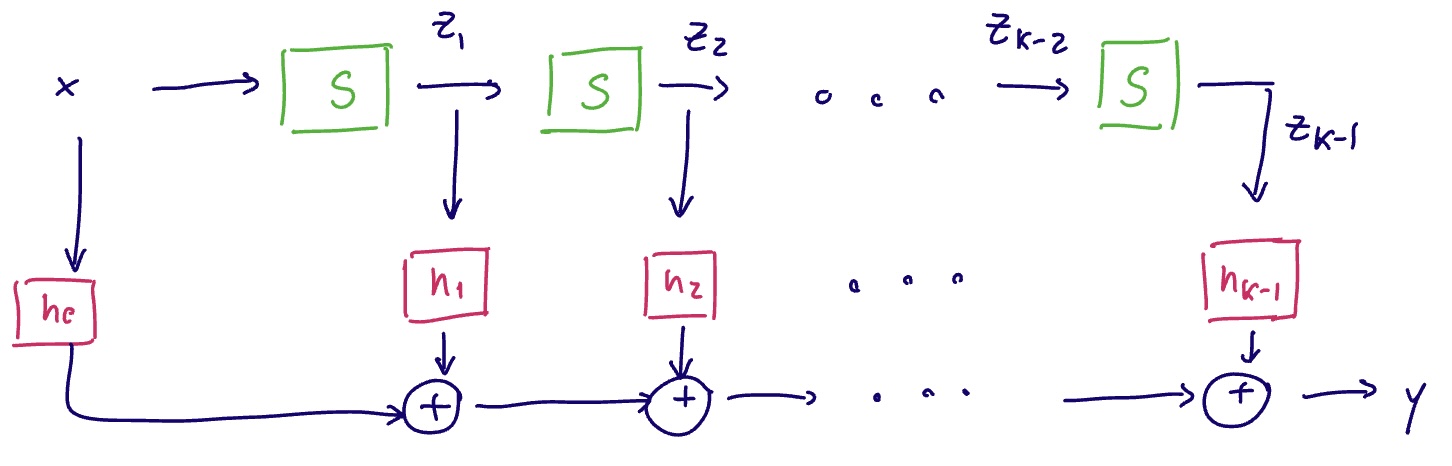
Visual representation of the stepwise local expression
graph convolution are shift equivariant.
Let
note: if
graph convolution are permutation equivariant.
Suppose we have a graph shift operator
Then
Thus
(see convolutional graph filters are permutation equivariant)
1.2 Spectral Representations of Convolutional Graph Filters
This is the fourier transform of a filter.
Given
The graph fourier transform of the filtered signal is given as
Thus, the GFT of the filter and the operator has the same polynomial relationship, but in the spectral domain.
see spectral representation of a convolutional graph filter
in the spectral/frequency domain, we have
The spectral representation/frequency response of
- the filter is independent from the graph. It is completely defined by the polynomial
in the spectral domain
- We can see from above that the filter frequency response only depends on the coefficients for the filter
and the eigenvalues of the shift operator. - If we consider another graph
with shift operator and . Then
- the
th spectral component of output only depends on and
is pointwise in the spectral domain. ie . This follows immediately from the fact that is diagonal.
The polynomial is fixed once we find the coefficients
(see the spectral representation of a graph filter is independent from the graph, the spectral graph filter operates on a signal pointwise)
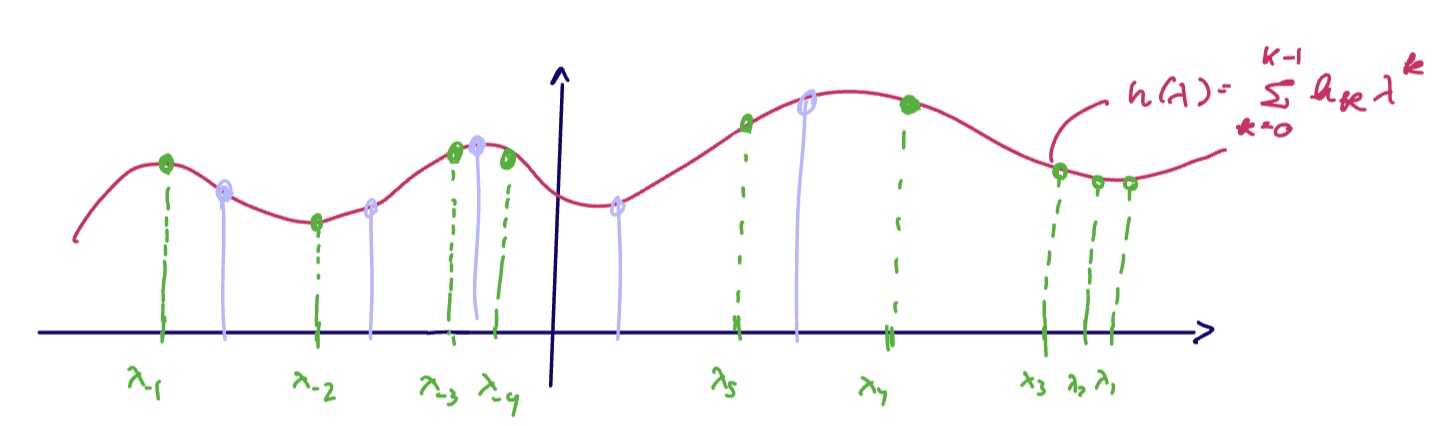
1.2.1 Expressivity of convolutional graph filters
What kinds of functions can
Suppose we want to design a filter with spectral response
Yes, as long as
see we can represent any analytic function with convolutional graph filters
Suppose
This follows immediately from the definition of an analytic function
Suppose we have a function
The Taylor series for
Here,
Thus we can define
We can (and in practice, will) truncate the degree
What are the limitations of the above expressivity result?
- it is spectral. It does not apply to the graph domain.
- This does not account for the specific graph / graph shift operator
or the specific graph signal
In general, we want to answer
Can we use
Let
Suppose
Then there exist
Recall from above that
We can write this as a linear system:
Note that LHS
In order to find a solution to the system (ie, in order for us to find coefficients
invertible to yield a solution
In the simplest case where
If