Lipschitz filters are stable to additive perturbations
[[concept]]
Theorem
Let
Suppose
Where
ie, graph convolutions are stable to additive perturbations, provided they have Lipschitz spectral response.
Proof
Exercise
Left as an exercise
Check Gama et al. 2019.
Note
The statement becomes
This means we have lipschitz stability to additive perturbations when
- this is not bad for small
, but terrible for large graphs unless for . - this holds for all graphs of size
. ie, this is a property of the graph convolution and will be true regardless of the actual underlying graph - Similar to filters that are stable to dilation,
can be controlled by design or by penalizing large values.
Example
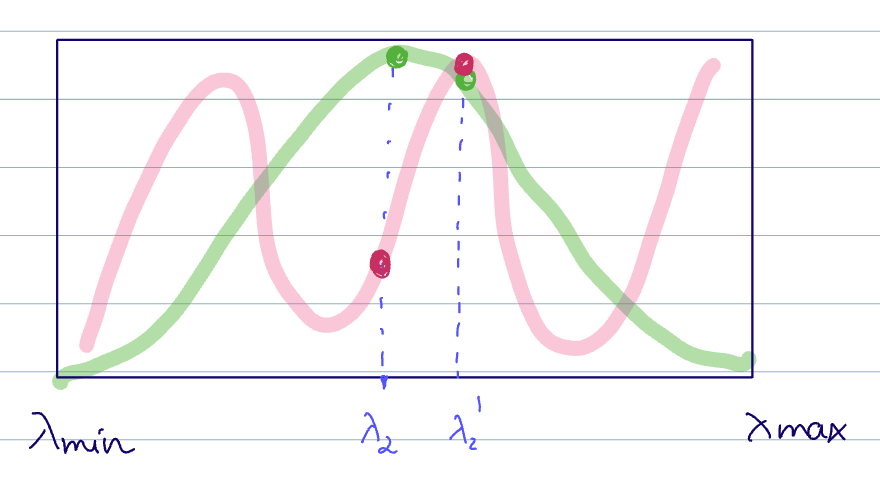
- there is a tradeoff between stability to the additive perturbations and discriminability
- The higher the
, the higher the spectral discriminability. The lower the , the better the stability of the filter.
Example